零散的知识点,一般是容易错的地方,主要的知识点总结在先前的博客中,已经遗失了。
广义表的表头是元素,表尾却是表
KMP算法
void getNext(const char *P, int *next) {
int i = 1; // 当前正在计算 next[i]
int j = 0; // 前缀末尾位置(前缀长度)
next[0] = 0; // 第一个字符没有前后缀
while (P[i] != '') {
if (P[i] == P[j]) {
// 前缀扩展成功
j++;
next[i] = j;
i++;
} else if (j > 0) {
// 回退 j,尝试更短的前缀
j = next[j - 1];
} else {
// j == 0,说明无法扩展
next[i] = 0;
i++;
}
}
}主要是如何构造对于比较串的next数组,利用了递归的思想,如果新添加的字符不匹配,回退J至先前的前缀
二叉树的性质
- 在二叉树的第i层上至多有2i-1个结点
- 深度为k的二叉树至多有2k-1个结点
- 对于任何一棵二叉树,若2度的结点数有n2个,则叶子数n0必定为n2+1 (即n0=n2+1)
- 具有n个结点的完全二叉树的深度必为[log2n]+1
- 完全二叉树的叶子数l和节点数n满足 l=⌊n/2⌋+1
“线索”指的是把二叉树中原来为空的左、右指针,用来指向在某种遍历顺序下的前驱节点或后继节点。
- 若某节点左子树为空,则其左指针可改为指向中序前驱。
- 若某节点右子树为空,则其右指针可改为指向中序后继。
将悬空的指针指向一个头节点 头节点的左指针指向root 右指针指向自己。
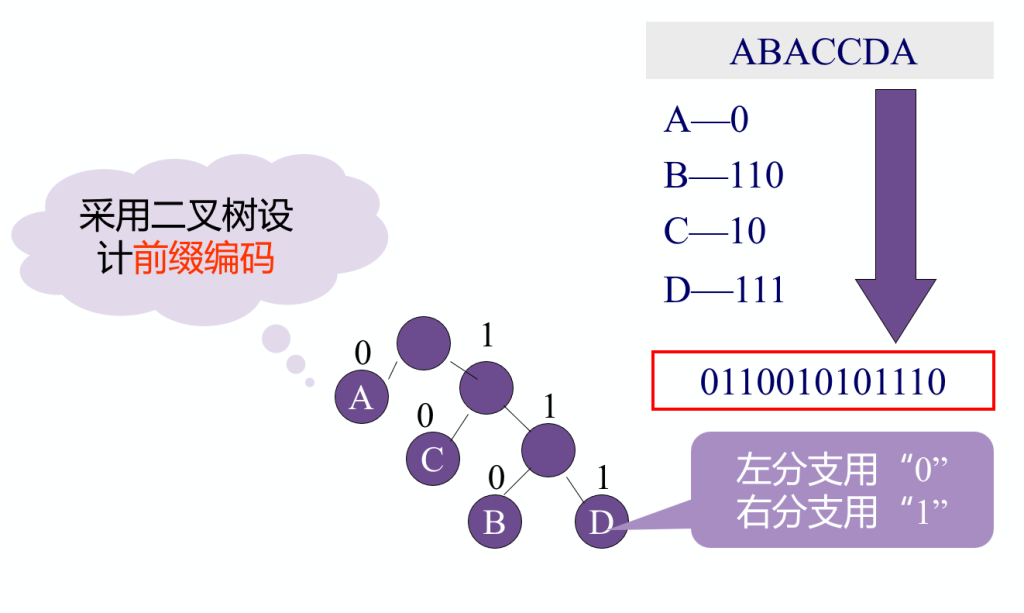
哈夫曼树:采用前缀编码,左分支用“0”,右分支用“1”。
树的存储结构
- 双亲表示法:每个节点存储其双亲节点的索引(数组中位置)
下标: 0 1 2 3 4
数据: A B C D E
父亲: -1 0 0 1 1- 孩子表示法:每个节点记录一个链表,链表中是它的所有孩子的编号。
节点 A: → B → C
节点 B: → D → E
节点 C: → ∅A的孩子为B,C 孩子用链表表示
- 孩子-兄弟表示法:每个节点只保存第一个孩子和下一个兄弟。
图的定义和术语
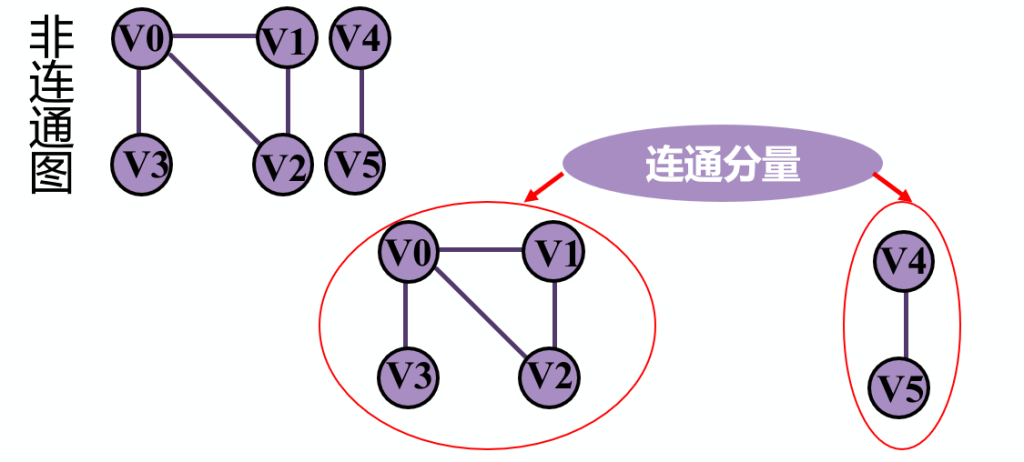
无向图G 的极大连通子图称为G的连通分量。
极大连通子图:该子图是 G 连通子图,将G 的任何不在该子图中的顶点加入,子图不再连通。
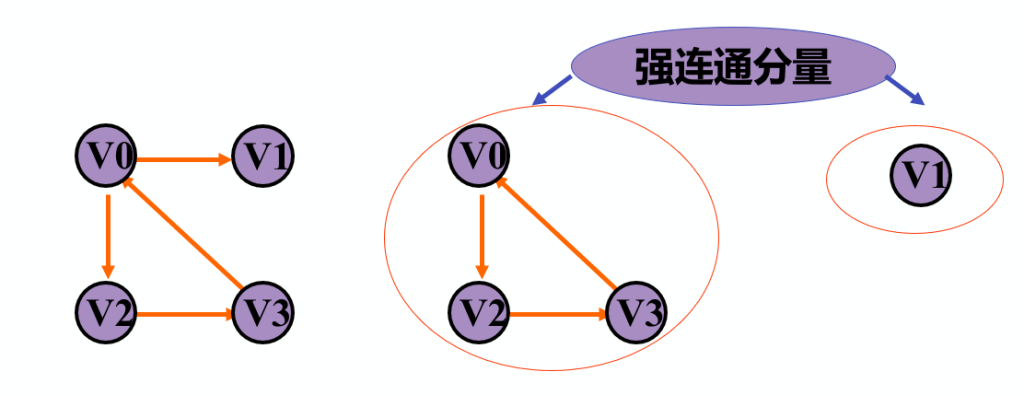
有向图G 的极大强连通子图称为G的强连通分量。
极小连通子图:该子图是G 的连通子图,在该子图中删除任何一条边,子图不再连通。
生成树:包含无向图G 所有顶点的极小连通子图。
生成森林:对非连通图,由各个连通分量的生成树的集合。
图的存储结构
邻接矩阵表示法
邻接表(链式)表示法
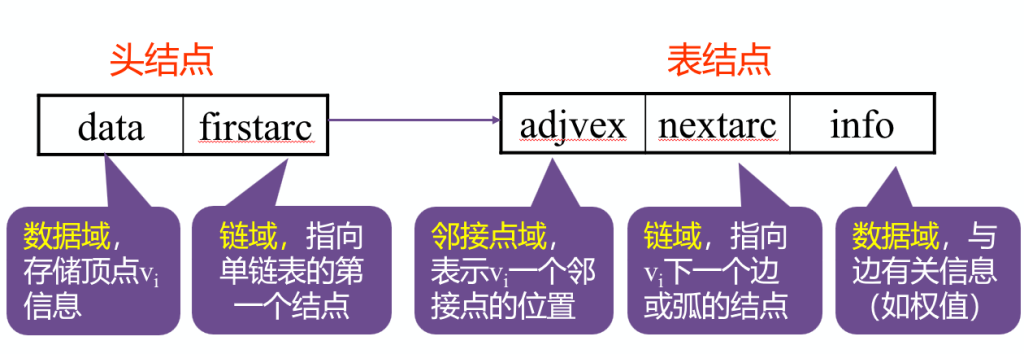
邻接点域:接入点的邻接表的编号
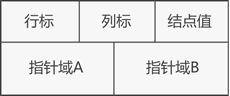
十字链表
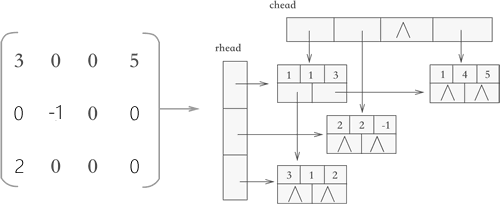
使用十字链表压缩存储稀疏矩阵时,矩阵中的各行各列都各用一各链表存储,与此同时,所有行链表的表头存储到一个数组(rhead),所有列链表的表头存储到另一个数组(chead)中。
下图是十字链表的结构:
普里姆算法(Prim’s Algorithm)(加点)
从任意一个点开始,每次选择权值最小的边,将新节点加入已选集合中,直到所有点都在树中。
详细步骤:
1.选择任意一个点作为起始点(如顶点 0)。
2.标记该点为已访问,并初始化其他点的最小连接边权(dist数组)。
3.重复以下步骤直到所有点都被加入生成树:
- 找出一个不在树中且与树中某节点连接的最小权值边。
- 将该边连接的点加入生成树。
- 更新所有未加入节点的最小连接边权。
克鲁斯卡尔算法(Kruskal’s Algorithm)(加边)
按边权升序排序,逐条选择边,只要不会构成环,就加入最小生成树中,直到包含所有节点。
1.将图中的所有边按权值升序排序;
2.初始化每个顶点为一个单独集合(使用并查集);
3.从小到大遍历每一条边 (u, v):
- 如果
u和v不在同一个集合(即不会成环):- 将这条边加入最小生成树;
- 合并
u和v所在的集合;
4.当加入的边数 = 顶点数 – 1 时,停止。
值得注意是,普里姆算法更适合稠密图,克鲁斯卡尔算法更适合稀疏图
迪杰斯特拉(Dijkstra)算法
一顶点到其余各顶点最短路径
- 先找出从源点v0到各终点vk的直达路径(v0,vk),即通过一条弧到达的路径。
- 从这些路径中找出一条长度最短的路径(v0,u)。
- 然后对其余各条路径进行适当调整
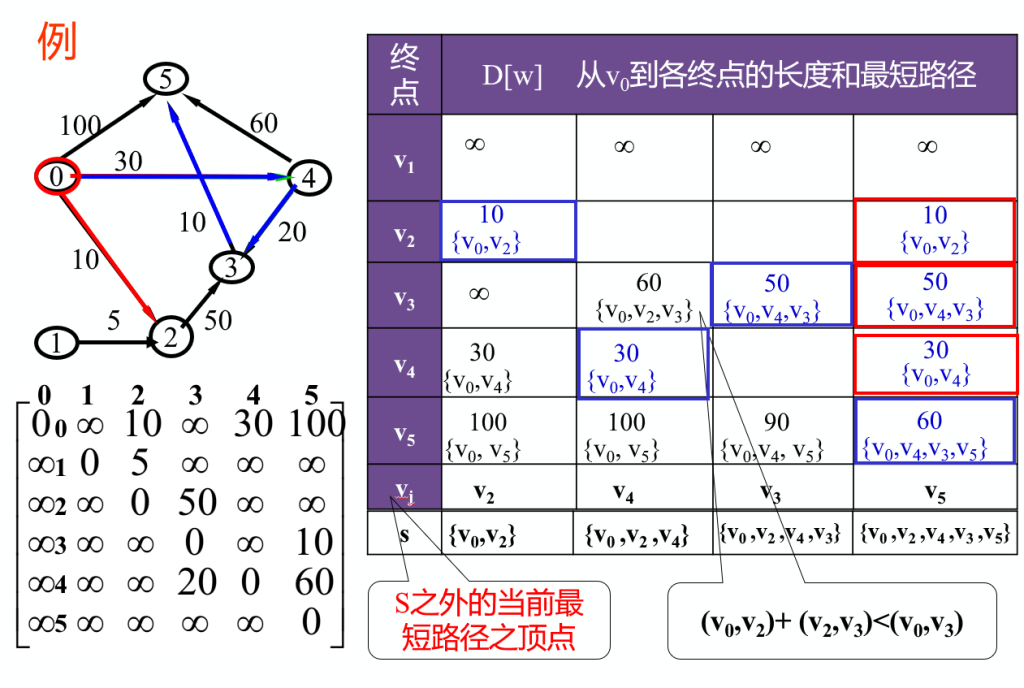
其中比较难理解的是加入新的点后的更新算法,加入的新点为u,那我们就只考虑比较 v0 到 v 的所有路径中,是否 v0 → … → u → v 更短即 dist[v] > dist[u] + graph[u][v] ,每一次 我们都只选取距离最小的点,体现了贪心算法的原则为。
// Dijkstra 算法:计算从 start 点出发的最短路径
void dijkstra(int graph[MAXN][MAXN], int n, int start, int dist[], int prev[]) {
int visited[MAXN] = {0}; // visited[i] = 1 表示点 i 的最短路径已确定
// 1. 初始化 dist 数组和 prev 数组
for (int i = 0; i < n; i++) {
dist[i] = graph[start][i]; // 初始路径长度 = start 直接到 i 的边权
if (graph[start][i] < INF)
prev[i] = start; // 起点能直接到达 i,则前驱是 start
else
prev[i] = -1; // 否则前驱未知
}
dist[start] = 0; // 自己到自己距离为 0
visited[start] = 1; // 起点加入集合
// 2. 进行 n-1 轮处理
for (int i = 1; i < n; i++) {
int u = -1;
int minDist = INF;
// 2.1 在未访问的点中选择 dist 最小的点 u
for (int j = 0; j < n; j++) {
if (!visited[j] && dist[j] < minDist) {
minDist = dist[j];
u = j;
}
}
if (u == -1) break; // 没有可以继续的点,退出
visited[u] = 1; // 将 u 加入集合
// 2.2 用 u 去更新它的邻接点 v
for (int v = 0; v < n; v++) {
if (!visited[v] && graph[u][v] < INF) {
if (dist[v] > dist[u] + graph[u][v]) {
dist[v] = dist[u] + graph[u][v]; // 更新最短路径
prev[v] = u; // 更新路径上的前驱节点
}
}
}
}
}弗洛伊德(Floyd)算法
弗洛伊德算法也是路径最短的算法一种,不过是计算计算任意两点间的最短路径。
使用动态规划思想,三重循环尝试用中间点 k 来更新任意点 i 到点 j 的最短距离。
for (k = 1; k <= n; ++k)
for (i = 1; i <= n; ++i)
for (j = 1; j <= n; ++j)
if (dis[i][j] > dis[i][k] + dis[k][j])
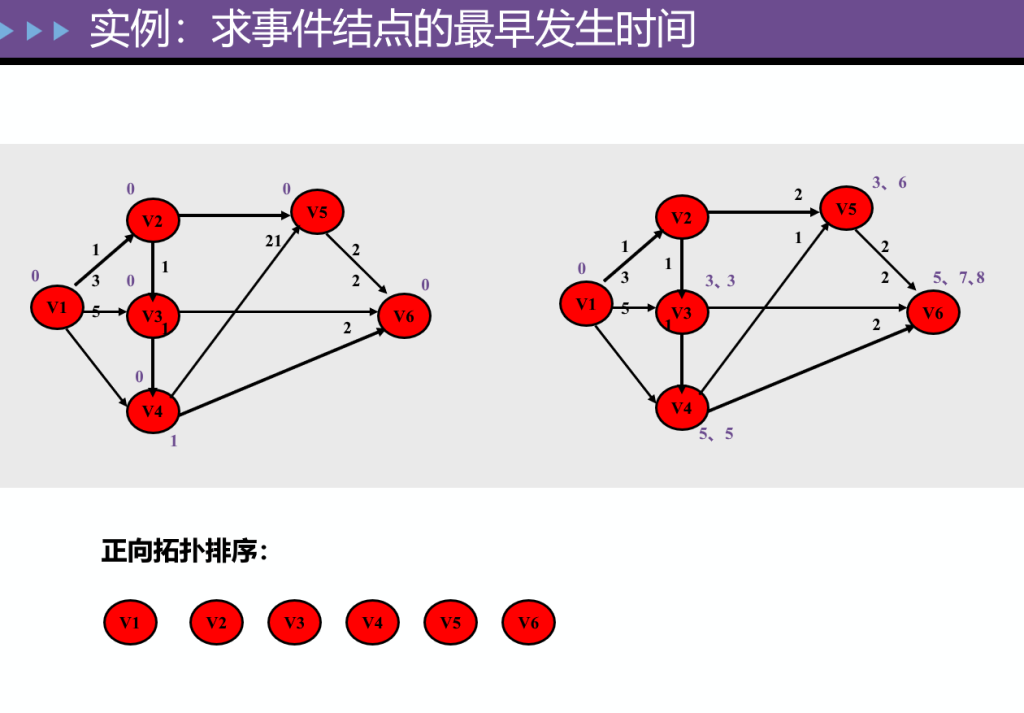
dis[i][j] = dis[i][k] + dis[k][j];拓扑排序与关键路径
构造拓扑序列步骤:
- 从图中选择一个入度为零的点。
- 输出该顶点,从图中删除此顶点及其所有的出边。
重复上面两步,直到所有顶点都输出,拓扑排序完成,或者图中不存在入度为零的点,此时说明图是有环图,拓扑排序无法完成,陷入死锁。
查找
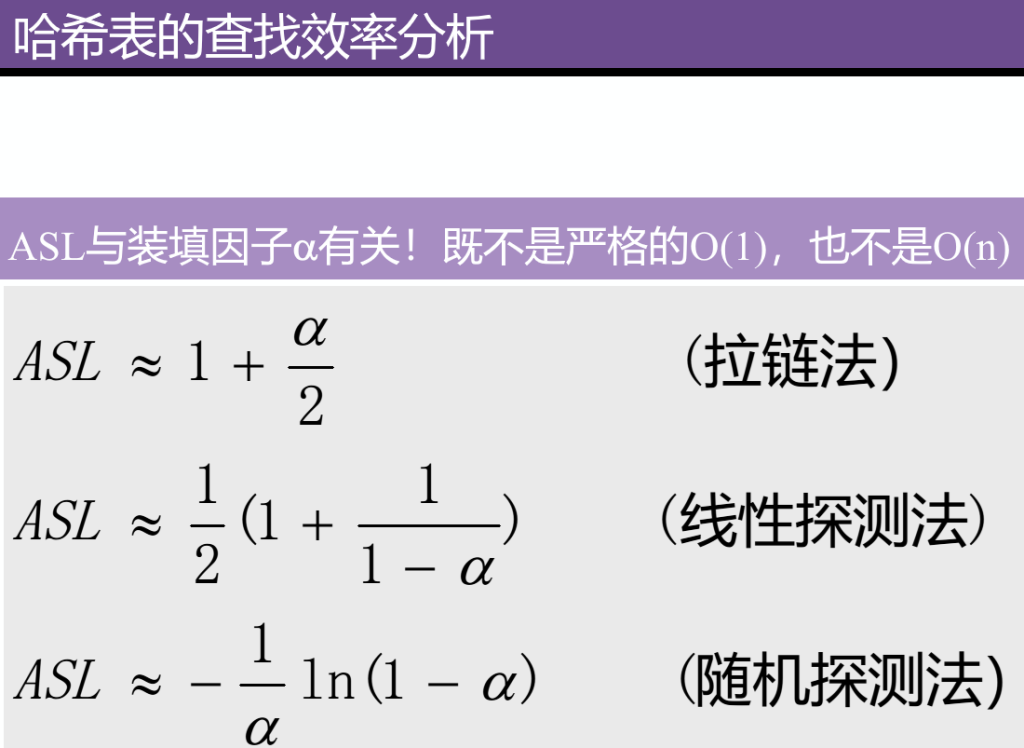
平均搜索长度ASL:关键字的平均比较次数
ASL总结:
- 顺序查找:查找成功(n+1)/2,查找失败n+1
- 折半查找: (log2 n)向下取整 + 1
- 分块查找:log2(n/s+1)+s/2 S为每块内部的记录个数,n/s即块的数目
- 装填因子:表中记录数/表的长度
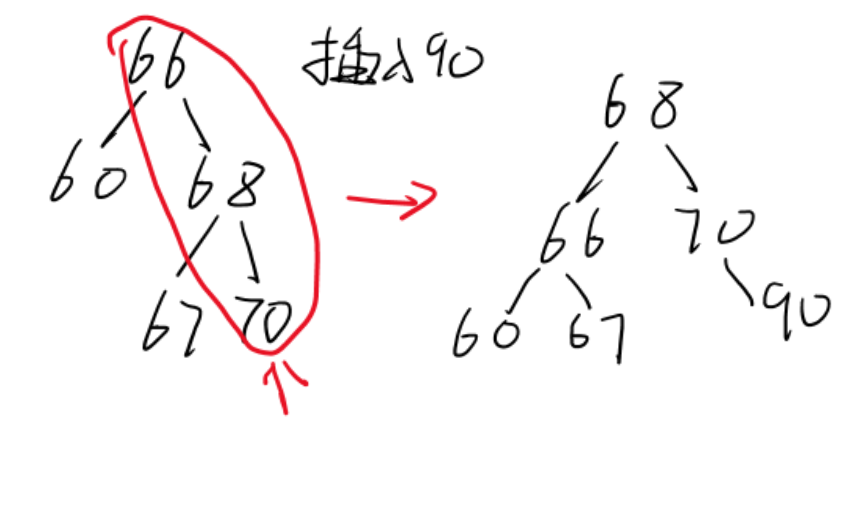
平衡二叉树
失衡的最小子树的根结点a在插入前的平衡因子不为0,且是离插入结点最近的平衡因子不为0的结点的。
平衡方法:
- 从插入节点从下往上寻找最小的不平衡子树 找到根节点
- 在插入节点到根节点上,画出最邻近的三个路径节点
- 对这三个节点进行平衡
- 其余的子树按照左边小,右边大的定义放上去
- 最后把整理好的数接入子树
排序
- 插入排序:时间复杂度 n2 空间复杂度 1 稳定
- 折半插入排序 :时间复杂度 n2 空间复杂度 1 稳定 平均优于插入排序
- 希尔排序 :“逐段分割”将相隔某个增量dk的记录组成一个子序列让增量dk逐趟缩短,最后一趟增量为1。时间复杂度 O(n1.25)~O(1.6n1.25)—经验公式 // 空间复杂度为 o(1) // 不稳定
- 快速排序:时间复杂度O( nlog2n ) //空间复杂度 log2n(递归要用到栈空间)// 不稳定
- 基数排序:时间复杂度O(d( n+rd))//空间复杂度O(n+rd)//稳定n个记录 每个记录有 d 位关键字 关键字取值范围rd(如十进制为10)
- 堆排序:时间复杂度O(nlog2n)//空间复杂度O(1)//不稳定
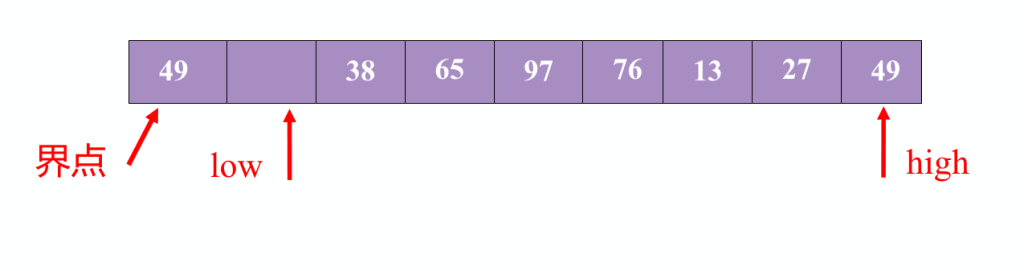
关于快速排序
基本思想:
- 任取一个元素 (如第一个) 为中心
- 所有比它小的元素一律前放,比它大的元素一律后放,形成左右两个子表;
- 对各子表递归快速排序,直到每个子表的元素只剩一个
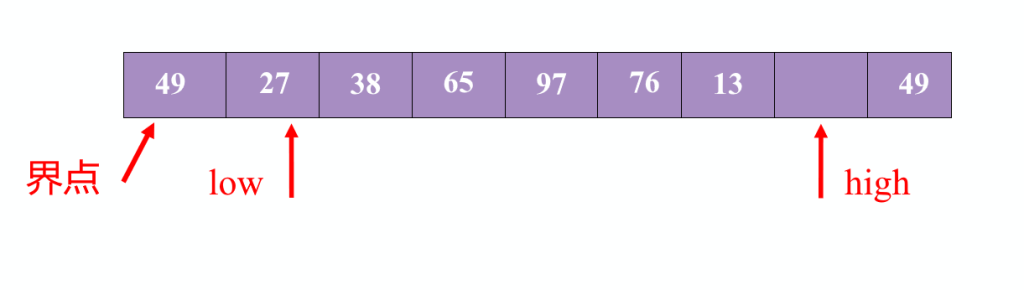
- 每一趟的子表的形成是采用从两头向中间,交替式逼近法
具体操作是通过表头表尾两个指针实现。
与界点相比,如果high指针指向的数据小,就将其数据放在low指针位置,同时low指针开始移动。
直到两个指针相遇,将哨兵数据放入相遇位置。对其左右的子表重新操作。
void QSort ( SqList &L,int low, int high )
{ if ( low < high )
{ pivotloc = Partition(L, low, high ) ;
Qsort (L, low, pivotloc-1) ;
Qsort (L, pivotloc+1, high )
}
}int Partition ( SqList &L,int low, int high )
{ L.r[0] = L.r[low]; pivotkey = L.r[low].key;
while ( low < high )
{ while ( low < high && L.r[high].key >= pivotkey ) --high;
L.r[low] = L.r[high];
while ( low < high && L.r[low].key <= pivotkey ) ++low;
L.r[high] = L.r[low];
}
L.r[low]=L.r[0];
return low;
}堆排序
堆的建立 :自下而上交换形成堆,直到堆顶,然后又自上而下监督,针对交换的元素重新建堆
堆的重新调整:输出堆顶元素后,以堆中最后一个元素替代之。将根结点与左、右子树根结点比较,并与小者交换。重复直至叶子结点,得到新的堆